![]()
Coordination team The GUI and the 3D display Exchange format Data optimizer
Available theme :
Bitmap wrapping 2D graph wrapping Toponymy in 3D Oriented 3D relief model Furtive flight at sight Fluid network Aerial power cable Underground gallery modeling Building and roof Land line wrapping (OS 1:10000 scale map) Flooding propagation River bed display on DTM Geological cross section Underground site modeling Pollution propagation Fire propagation modeling Itinerary under constraints GSM Follow-up of vehicles Photos database Discreet simulation on DTM Vegetal growth modeling
Principle used :
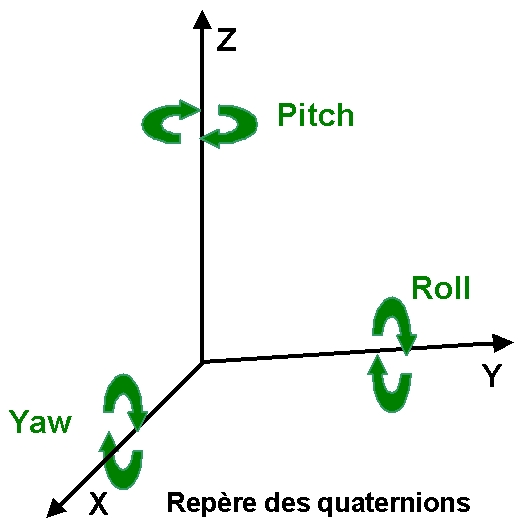
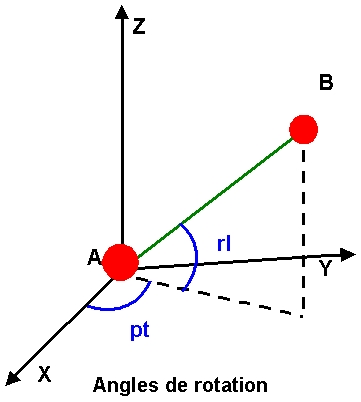
Quaternions
Multi-thematic :
Interfacing example
Links :
Programming : All the languages. GIS and informatic : jobs, lessons, bibliography. Formations. Linux : to the world of the penguin. Various : Other links.
![]()